Un nouveau projet de robot aspirateur open source, baptisé oomwoo, a vu le jour en juin 2026. Porté par le développeur Ilia O. dans le cadre de sa série Maker's Pet, il se distingue par son approche radicalement différente de celle des appareils commerciaux : l'ensemble du matériel, du firmware et du logiciel est publié sous licence Apache 2.0, et l'engin fonctionne entièrement en local, sans jamais solliciter un cloud ou un fabricant. Son nom est un ambigramme rotationnel : il se lit à l'endroit comme à l'envers, par analogie avec les rotations du robot.
Une architecture ouverte et économique
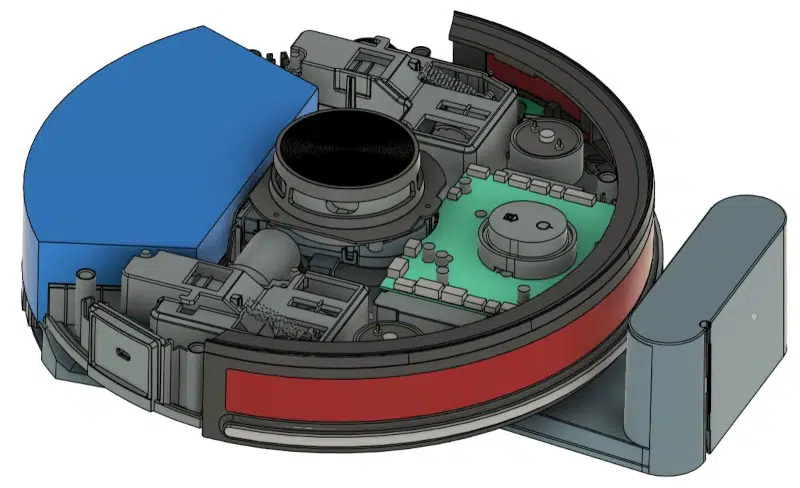
Le cœur du système repose sur un Raspberry Pi 5 doté de 4 Go de RAM, associé à un LiDAR 2D bon marché, le tout chapeauté par ROS 2 (Robot Operating System version 2) et la pile de navigation Nav2. Le châssis est conçu pour être imprimé en 3D, et les fichiers de conception sont documentés et accessibles. Cette approche permet de réparer et de faire évoluer l'appareil, à rebours des gadgets jetables du marché. L'intégration native avec Home Assistant est prévue. Le coût total des composants est estimé entre 90 et 170 euros, auxquels s'ajoutent environ 130 euros pour le Raspberry Pi 5, soit un budget maximal de 300 euros. À titre de comparaison, cela permet d'obtenir un résultat que ses concepteurs jugent comparable à un aspirateur commercial vendu aux alentours de 500 euros.
Un projet encore en construction
Pour l'instant, oomwoo ne remplit qu'une partie de ses promesses. Le robot sait cartographier un espace et se déplacer de manière autonome grâce aux algorithmes SLAM (localisation et cartographie simultanées) et à la navigation ROS 2. En revanche, il n'aspire pas encore : la fonction d'aspiration proprement dite n'a pas été implémentée à ce stade. Le projet en est à la phase de demande de commentaires (RFC, request for comments) et n'a pas donné lieu à un prototype physique assemblé. Aucune notice de montage ni documentation utilisateur complète n'est disponible pour le moment. Les plans sont développés publiquement sur GitHub, ce qui permet à la communauté de contribuer dès les premières étapes.
Le sans-cloud comme argument décisif
Le positionnement d'oomwoo tranche nettement avec celui des aspirateurs robots classiques. La plupart des modèles grand public, comme ceux de Roborock ou iRobot, s'appuient sur des serveurs distants pour la cartographie, la reconnaissance d'objets ou les commandes vocales. Les données collectées transitent par des serveurs souvent situés à l'étranger, et les utilisateurs n'ont qu'un contrôle limité sur leur appareil. Oomwoo promet de rompre avec ce modèle : tout le traitement s'effectue en local, et le code source est ouvert, ce qui permet à chacun de l'auditer, de le modifier ou de l'adapter. Pour les personnes soucieuses de leur vie privée ou désireuses d'apprendre la robotique, le projet offre un terrain d'expérimentation sans dépendance à un fabricant ni à des services tiers.
Kit optionnel et perspectives
Pour ceux qui ne souhaitent pas sourcer eux-mêmes chaque composant, une boutique en ligne (makerspet.com) proposera un kit rassemblant les principaux éléments : moteurs, PCB, brosses, joints et LiDAR. Il reste toutefois possible d'acheter chaque pièce séparément, notamment via des plateformes comme AliExpress, pour optimiser les coûts. Le développeur a également évoqué l'ajout ultérieur de fonctions cloud et d'une boutique d'applications ROS 2 en partenariat avec remake.ai, mais il a précisé que le noyau de l'aspirateur resterait 100 % local, y compris en sortie de boîte.
À ce jour, oomwoo n'est pas un produit fini, mais un projet en cours de maturation. Il s'adresse d'abord aux passionnés de robotique, de bricolage et d'open source, prêts à investir du temps dans l'assemblage et la programmation, plutôt qu'à des consommateurs cherchant une solution clé en main.
En résumé : oomwoo est un aspirateur robot open source, basé sur Raspberry Pi 5 et ROS 2, fonctionnant sans cloud, dont le châssis est imprimable en 3D. Son développement en est encore à ses débuts : il cartographie et se déplace, mais n'aspire pas encore. Le coût total estimé est inférieur à 300 euros, et un kit optionnel sera disponible. Le projet est développé publiquement sur GitHub.